
Le capteur de présence devra permettre de savoir si une personne est présente devant le cartel dans la vitrine.
Si une personne est détectée, un texte numérique dynamique sera combiné avec le cartel sérigraphié.
Principe de fonctionnement
Le capteur est concu autour d’un capteur de distance infrarouge Sharp GPD. Ces capteurs emmettent un faisceau infrarouge modulé à 40kHz environ (afin d’éviter des faux positifs dûs à la lumière ambiante) et réceptionne ce faisceau lorsqu’il est réfléchi par un obstacle se troyvantentre 20 et 150 cm. Ce faisceau à globalement une forme de ballon de rugby avec un diamètre maximum au centre de 16 cm.
Il traduit ensuite la distance relevée en tension qu’il met a disposition sur une broche (VO).
Cette broche est reliée à un convertisseur A/D (ADC Texas Instrument TLC549). Ce convertisseur va transformer la tension reçu du GPD en nombre variant entre 0 et 255 (c’est un convertisseur 8 bits). Etant donné la plage de tension renvoyée par le GPD (de 0 à 3v environ) et vu la tension de référence utilisée (5v, par simplicité), il y a une perte de résolution d’environ 40%. Ce n’est pas un gros problème dans notre cas, puisque nous cherchons en fonctionner en tout ou rien : soit un visiteur est devant le cartel, soit il n’y a personne.
La valeur numérique convertie par l’ADC est récupérée sur un PC via des lignes du port parallele, servant à piloter le convertisseur.

- Câble finalisé

Toute l’électronique (très sommaire !) est incluse dans le connecteur du port parallèle.
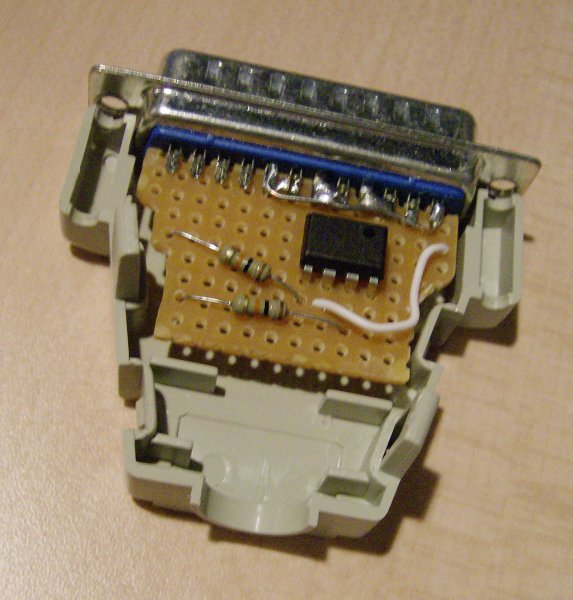
- Connecteur
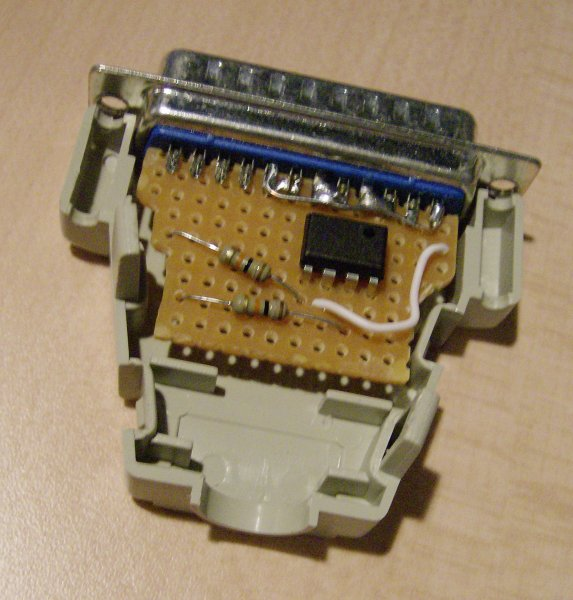
Avec juste quatre composants, le schéma du circuit utilisé est minimaliste.
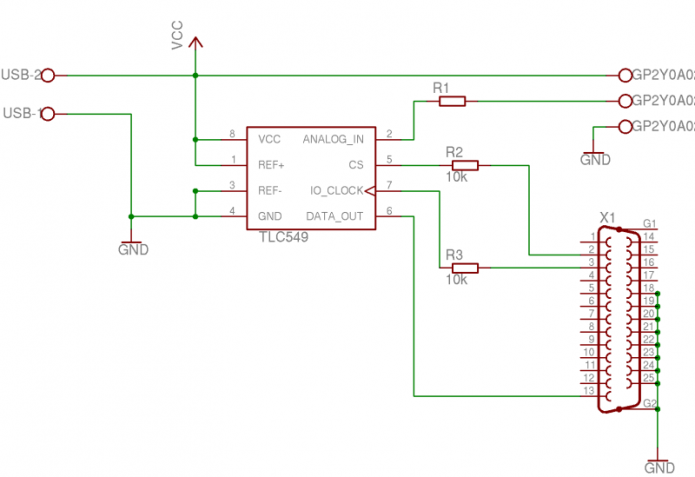
- Schéma de câblage du capteur
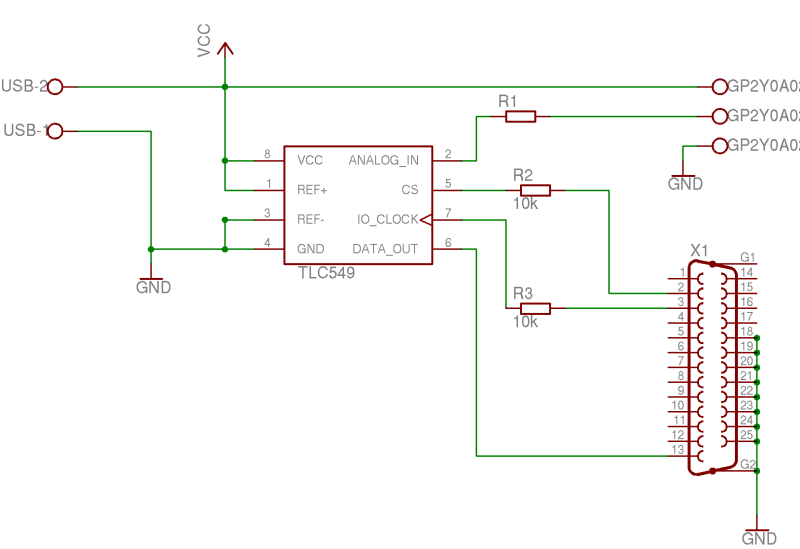
Le code servant à piloter l’ADC ainsi que le schéma eagle sont attachés en fin d’article.
Réalisation
Extérieurement, ce capteur est constitué :
- d’un port parallèle
- d’un port USB
- du capteur Sharp

- Câble et connecteurs

Le port parallèle sert à récupérer les données recues par le GPD et converties par l’ADC. Il est muni d’une LED permetant de vérifier l’alimentation du système.
Le port USB sert uniquement à récupérer les 5v nécessaire au fonctionnement du système (d’ou la référence de 5v pour le convertisseur A/D).
Lors de la mise en service, il faut *IMPERATIVEMENT* brancher le câble USB *AVANT* le port parallèle.
Attention à la longueur de câble. Pour des longueurs importantes, il est impératif d’utiliser un câble blindé.
Pilote
Le pilote du capteur est écrit en C avec la librairie Parapin.
Il permet de spécifier le delai entre chaque d’acquisition depuis le capteur (-d
Un script perl (’filter’), permet d’appliquer un filtre RPN sur les valeurs recues. Ce script lit les valeurs sur l’entrée standard et leur applique une série d’opérations (passés en argument).
Un autre script, osc_send, permet d’envoyer une valeur à un serveur OSC.
A titre d’exemple la simple ligne de commande suivante :
./monkeyBusiness -d 100 | ./filter get get + pop loop | ./osc_send -d 192.168.99.99 -p 4321 -i '/Capteurs/IR/1'permet de :
- lire la tension convertie en digital sur le capteur toutes les 100 ms (-d 100)
- prendre deux de ces valeurs (’get’ ’get’), les additionner
- envoyer le résultat (’pop’) au serveur 192.168.99.99 (port 4321) en utilisant le protocole OSC
Les valeurs recues en OSC on déja été exploitées par Patrick pour piloter une synthèse sonore (fréquence changeant en fonction de la distance de l’object capté) et des lumières (intensité changeant en fonction de la distance de l’object capté).
Coût
Le cout total d’un système complet est dans les 25€. 80% du prix est dû au capteur, le reste de l’électronique est négligeable.
On peut diviser ce coût par deux en utilisant un capteur 10cm-80cm au lieu de la version "longue portée" 20cm-150cm.
En fonction de l’usage, il faudra privilégier l’utilisation de "barrières infrarouges" ou de simplement lumineuses. En effet, s’il s’agit uniquement de capter un passage, nul besoin de passer par un capteur si sophistiqué et une conversion analogique. Seule l’information bianaire "faisceau coupé ou non" nous intéresse.
Concernant le convertisseur A/D Texas, il peut être obtenu gratuitement sous deux jours en demandant des échantillons chez le constructeur (très généreux et très performant sur ce plan).
Plus de capteurs
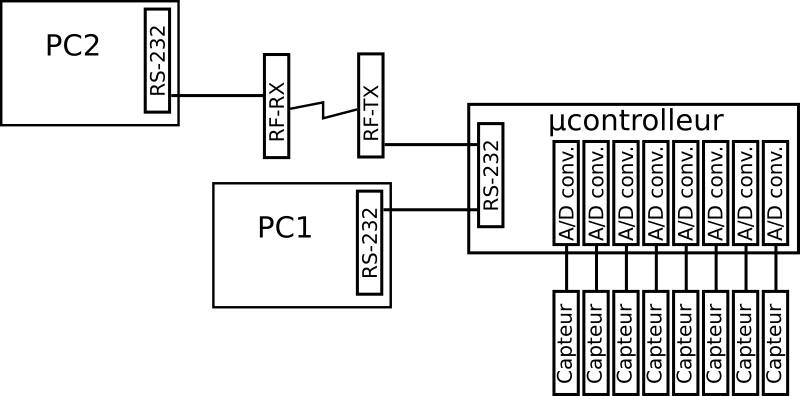
Il est possible multiplier le nombre de capteurs. On peut imaginer étendre le principe utilisé ici en multipliant les convertisseurs A/D ou en utilisant de convertisseurs avec plusieurs entrés multiplexées (un TLC540 par exemple possède 11 entrées).
On peut aussi confier la conversion à un microcontrolleur (voir Capteurs de présence pour l’exposition Frontières).
Ce dernier se chargera de transmettre ensuite les valeurs digitalisées via une liaison série RS-232 avec fil (PC1) ou sans (PC2) par exemple.
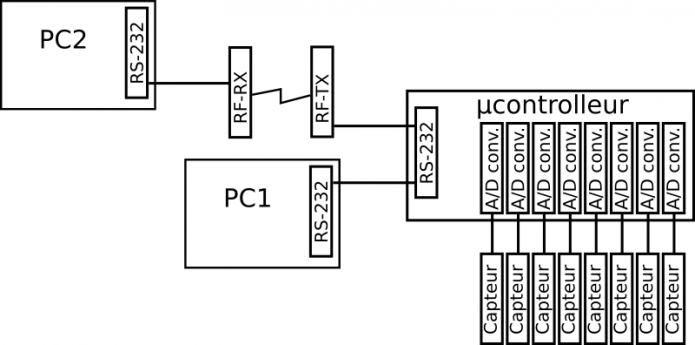
- Des convertisseurs A/D en nombre
Tests
Afin de tester les performances du capteur, il a été placé dans une cloche de verre (env. 6mm d’épaisseur).
Les performances dans ce contexte ne sont bonnes que si le capteur est à moins de 5cm de la vitre à traverser.

- Test cloche de verre Erasme

Dans ce cas, les performances sont excelentes et les visiteurs peuvent êtres détectés quasiment à 3 mètres !
D’autres tests ont été effectués au Muséum sous la cloche définitive, confirmant les premières mesures.
- Test sous la cloche définitive

Positionnement du capteur
Plusieurs hypothèses ont été envisagées. L’inquiétude principale était l’étroitesse du faisceau de détection, et les faux négatifs (non-detection) que cette particularité pourrait engendrer.
Le positionnement du capteur à donc été décidé afin de minimiser les non-détections.
L’idée initiale était de place le capteur à la verticale du visiteur, et de poser une marque au sol clairement visible afin de l’amener sous le faisceau. Pour mettre en place la capteur, une potence à docn été réalisées, mais au dernier moment, pour des raisons esthétiques et structurelles, cette option a été abandonée.
Le capteur s’est donc retrouvé fixé à l’horizontale contre l’escalier.
A la lumière des premières visites, ce positionnement fonctionne parfaitement. Le seul risque est le "tripotage" par les visiteurs.
Pour aller plus loin...
Le site d’Acroname Robotics possède quelques articles très intéressants, dont un sur les capteurs Sharp.
Un deuxième article (Le chimpanzé, le pingouin et le chameau) détaille la partie pilotage du dispositif de diffusion.
Enfin, un autre article (Du "labo" au terrain : guide de survie en environnement hostile) regroupe une certain nombre de considérations générales sur le déploiement de prototypes comme interactifs muséographiques.

